

Early in my career I had an opportunity I thought would take many more years to achieve. I was able to work with Jet Propulsion Laboratory (JPL) to ensure a critical component on the Mars Science Laboratory (Curiosity Rover) would function properly throughout its lifetime on Mars.
My work with JPL on Curiosity did not start on the rover which is now on Mars. The project took months and we started with many test models. This was my first introduction and I thought this was going to be the extent of my work with the rover. We started with engineering models, then flight models, and then models that were identical to the real thing, but still not the real parts now on Mars. The parts I am referring to are known as SAM and CheMin.
The SAM is the Sample Analysis at Mars instrument which houses a gas chromatograph, mass spectrometer, and a tunable laser spectrometer all used to identify a wide range of organic (carbon-containing) compounds. In order to use all of these tools, martian dirt has to be sent to each of the analyzers. There is a wheel of 74 small cups for samples that rotate under a collection funnel. The inlet funnel accepts dirt which is scooped up and poured from a robotic arm on the rover. To pass the dirt to the analyzers a sieve in the inlet funnel shakes to sift dirt through. This is where I come in. The shaking sieve is what I analyzed with the Polytec 3D laser vibrometer.
The CheMin is the chemistry and mineralogy instrument, which uses X-ray diffraction and fluorescence analyzers to study mineralogy and chemical composition of rock and soil on Mars. Much like the SAM, the CheMin must have samples passed to it and the use of another shaking and vibrating sieve is critical for the sample collection.
While analyzing the prototype models of the SAM and CheMin, we ran a number of tests. Mostly we would excite the devices under operational conditions or run ramp up or ramp down frequency sweeps. The tests are critical for determining if experimentally, the prototypes are behaving as computer models would suggest. By running operational test conditions, we can determine the maximum amplitudes of vibration experienced and by running the sweeps, we can determine resonances of the mechanical system. We also had a large box of red dirt which we used to test the devices and we would often speculate as to how NASA and JPL were able to obtain such a large amount of “Martian dirt” back on Earth for us to use.
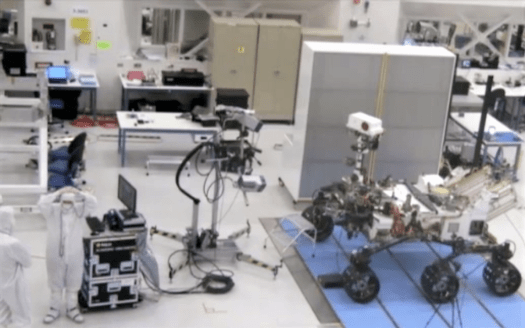
After completing the testing on engineering models, the Curiosity rover was in the middle of construction in the spacecraft assembly facility (SAF) at JPL. This is the facility that all of the grade school field trips go to see. You can look from the observation deck and see all the workers below in white “bunny suits” through the glass window working on assembling objects that will one day be sent to space, or in this case to Mars. We learned about a month after our last round of testing on the prototypes, that we would be required to come back and test the final flight hardware inside the SAF. The picture above shows the Polytec equipment going face to face with the Curiosity rover as I was scanning the lasers on the SAM inlet funnel to test functionality. There was a live stream video of my work and my friends watching online had a hard time identifying which white suit was me, so here I am posing with my hands on my head.

The tests on the flight hardware were a success and proved that the equipment was functioning as expected. This is a necessary confirmation, because it is a costly service to send a repair man to fix anything that breaks once the rover is on Mars. Think of any project you have ever worked on for the first time. How often do you get it right on the first attempt? For the Curiosity rover, there is no second attempt. The first one must function as planned on the first try. Proper engineering design and experimentation and testing are required to ensure success.
The rover launched on November 26th, 2011, successfully, landed on the surface of Mars on August 6th 2012, and is still functioning and collecting data today. To have a more detailed look at the type of analysis and testing I provided with Polytec studying the vibrations of the SAM and CheMin, follow the link below to a publication on our work in InFocus magazine (published by Polytec).